论文题目:Multi-Stage Prediction Networks for Data Harmonization (MICCAI19)
背景
由于图像采集缺乏标准化,数据协调(data harmonization)的目的是为了消除因扫描仪,中心或采集协议的规格而引起的差异。现有的方法往往针对每个设备训练一个单一网络,由于数据集比较少,所以往往会导致过拟合,而且未能充分利用多个预测任务之间的协同作用,因为这些预测任务通常是紧密相关的。而多任务学习允许模型集成来自多个平台的数据信息,为DH训练数据缺乏提供了一个强大的解决方案。
主要贡献
本文第一次将多任务学习引入数据协调,其目标是在不同的采集平台和站点之间协调图像,整合不同数据信息,提高模型的预测性能和学习效率。作者提出了一种多阶段预测(MSP)网络,即一个多任务学习框架,该框架将不同结构的神经网络(针对不同的个体采集平台进行训练)整合到一个统一的架构中。MSP将预训练好的单任务网络的高层次(high-level)特征作为额外网络的输入来指导最后的预测,用任务之间的冗余来充分利用有限的训练数据。
数据集
协调的数据由10位志愿者在三台不同的扫描仪上得到,分别为3T General Electric scanner,Prisma scanner,Connectom scanner,并有两种不同的协议(standard (st) protocol,state-of-the-art (sa) protocol),得到以下四种不同的数据,单目标网络将ge_st作为输入,分别预测其他三组图像。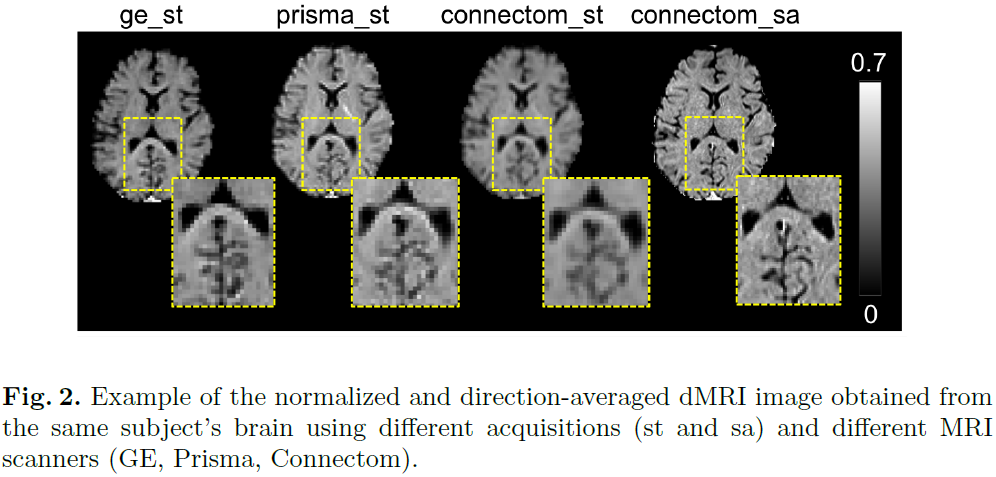
数据预处理
对于得到的raw data先进行配准和归一化操作,随后从归一化数据信号中估计得到的6阶 real-and-symmetric SH deconvolution的28个系数作为分离的通道(不知道怎么翻译,给出原文We employed [17,18] where the 28 coefficients of the 6th order real-and-symmetric SH deconvolution were estimated from the normalized raw signal considered as separate channels of our data.)
网络结构
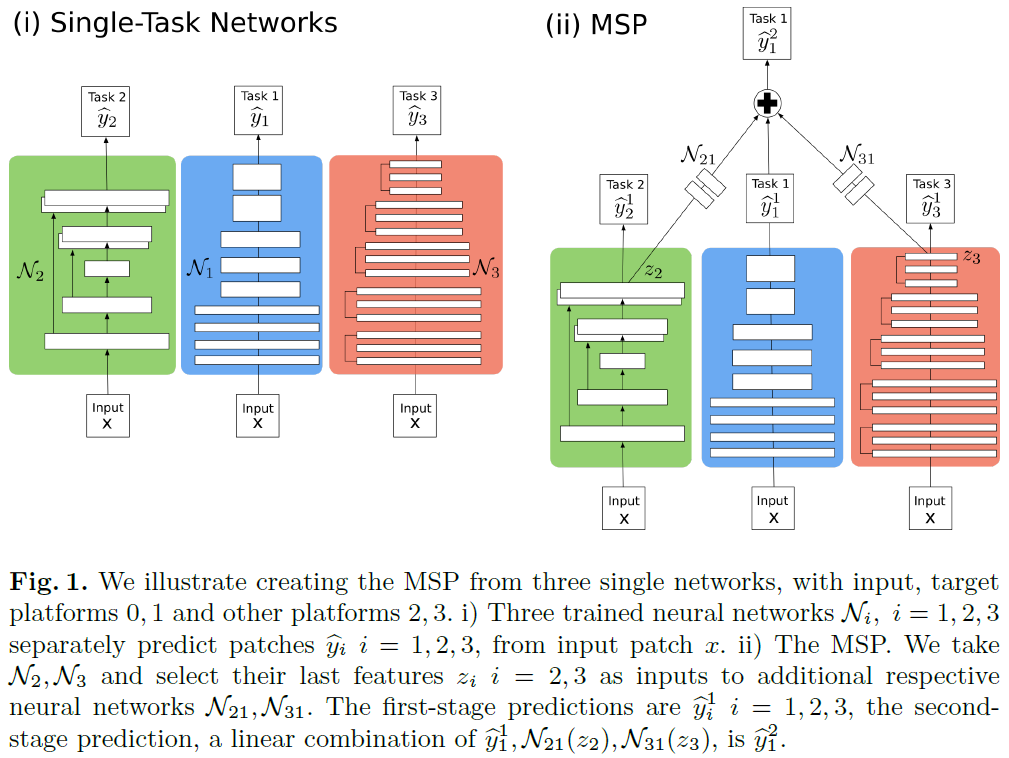
把预测图像记为\(I_{ij},i=1,\dots,P-1,j=1,\dots,N\),输入图像记为\(I_{0j}\),其中N为图像数量,P为不同的设备数,\(T\in {1,\dots,P-1}\)为目标输出。文中的网络以\(P=4,T=1\)为例来说明。从上图的左半部分可以看到,对于单任务来说,要训练P-1个网络\(\hat{y}_{T}=N_T(x)\)。右半部分,先选择了P-1个最先进(SOAT)的预训练好的单一网络,作为多阶段网络(MSP)的第一阶段预测,即\(\hat{y}_{T}^1=N_i(x),i=1,\dots,T\)。若\(i \neq T\),把网络\(N_i\)的最后一个feature map记为\(z_i\),并构造新的网络\(N_{iT}\),第二阶段将\(z_i\)作为输入(利用其他平台的信息),再与第一阶段得到的\(\hat{y}_{T}^1\)进行线性结合来预测目标设备T的最终结果,即:
损失函数也分为两阶段,文中用的是MSE,分别为:
实验结果
文中作者分别对比了一些有代表性的单任务网络与多任务网络,如下: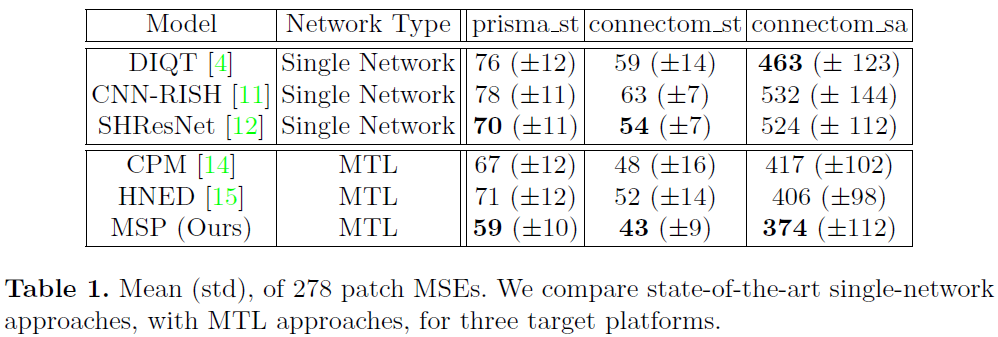
总结
这篇论文中,作者主要运用了多任务学习的方法,如多阶段预测MSP如何提高DH中深度学习的预测能力,以及如何改进目前最先进的单一网络方法。
我的博客即将同步至腾讯云+社区,邀请大家一同入驻:https://cloud.tencent.com/developer/support-plan?invite_code=1sw3ok0rq88g1